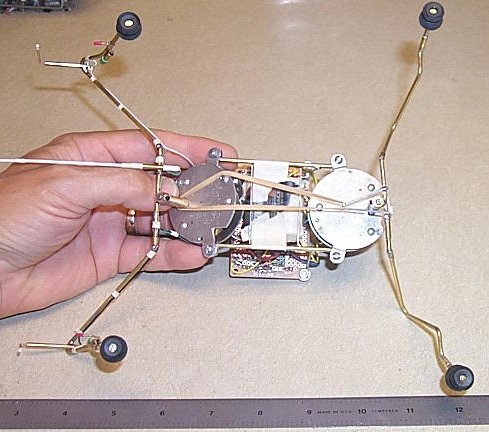
The gear sets are roughly 1:133, this is from a quick tooth count. The front motor rotates about 40 degrees and the rear motor rotates about 50 degrees for the same elapsed time on a microcore. The two motors are different.
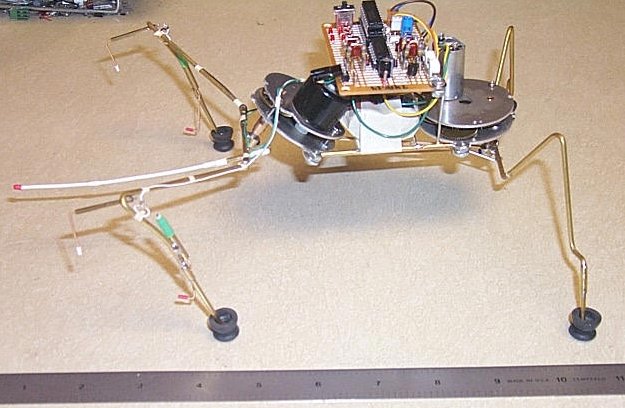
MicroCore is the 74AC14 with the two diodes to keep it in step. The motor driver is a reversing 74AC240 setup. Both circuits are from Wilf Rigter, Thanks Wilf! Timing R/C = 1.75M resistors and 0.1UF caps. The circuit board is from Radio Shack. There are four LED's to show the motor driver activity and another LED to show when the backup circuit is activated.
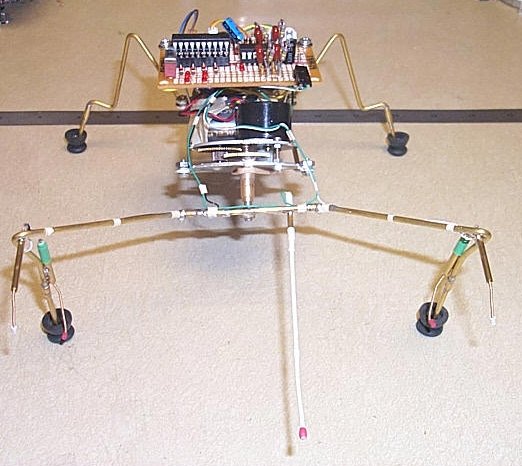
Whiskers are guitar wire with heat shrink inside of 1/8" brass tubing. When bent, the guitar wire touches the tube, and then the timed backup begins.
Battery is surplus Lithium, 3V each, two batteries. Yes, it does step lively! The neighbor dog, "Lucky Dog" does bark a lot when I am outside testing in the flower beds.
Feet are soldered on brass thumbtack heads and over the tack heads are vibration dampening rubber boots from old hard drives. Since I live in Oregon, I guess that you could call them "galoshes".
As it walks, it sort of "stomps" it's feet. This does cause problems with the permanently mounted front leg "sensors". Sometimes they trip when a front foot comes down.
A single rubber band keeps the back feet in line.