Number Three Walker (No Name)



















This is a two motor walker. The surplus "1/3 RPM"
gearset is used, with CD Spindle Motors attached.
 Movie:
Courtesy
of Dennis Coleman, Thanks Dennis! 15 seconds
of MPEG style, 1.37MB.
Movie:
Courtesy
of Dennis Coleman, Thanks Dennis! 15 seconds
of MPEG style, 1.37MB.
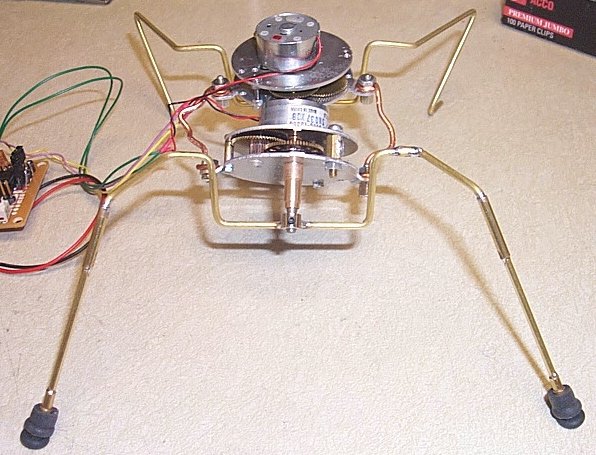
 Here
you see the front view, without the circuit board or batteries attached.
The rubber feet are for walking on carpet, works great! Normally my 'bots
can't walk on my carpet, this one does, but only with these 'boots' on.
Back feet just dig into the carpet nap and push ahead. Haven't tried the
backup circuit yet and may change how the back feet are shaped.
Here
you see the front view, without the circuit board or batteries attached.
The rubber feet are for walking on carpet, works great! Normally my 'bots
can't walk on my carpet, this one does, but only with these 'boots' on.
Back feet just dig into the carpet nap and push ahead. Haven't tried the
backup circuit yet and may change how the back feet are shaped.
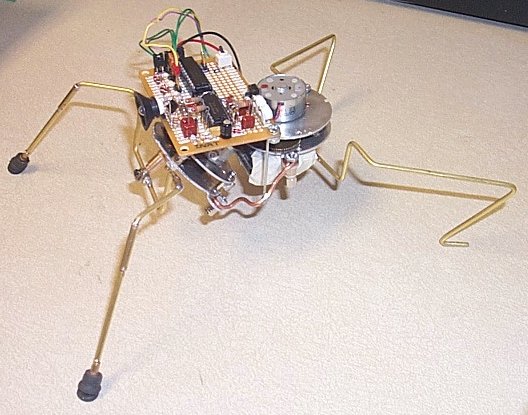
 Left
side view, with all attached. Batteries are under the back gearset, held
in with a rubber band.
Left
side view, with all attached. Batteries are under the back gearset, held
in with a rubber band.
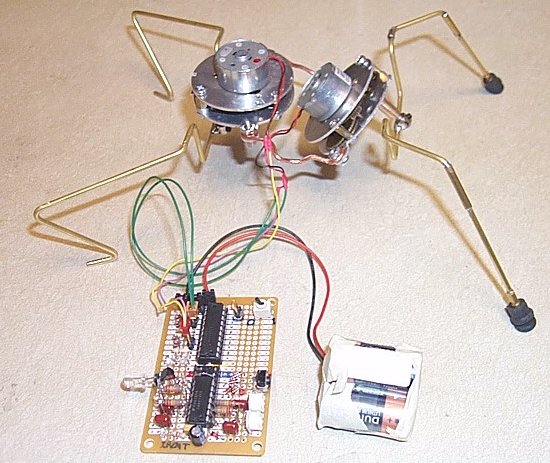
 Right
side view, with all unattached. Rubber feet are on the front legs. The
clear LED on the (left side in picture) circuit board is for future IR
object detection. It is a 6000mcd RED-LED, can't look into this one, it's
that bright. It shines a moving spot out in front from it's 8 degree light
cone. It pulses about 3Hz. Credit for LED driver
and receiver goes to Wilf Rigter.
Right
side view, with all unattached. Rubber feet are on the front legs. The
clear LED on the (left side in picture) circuit board is for future IR
object detection. It is a 6000mcd RED-LED, can't look into this one, it's
that bright. It shines a moving spot out in front from it's 8 degree light
cone. It pulses about 3Hz. Credit for LED driver
and receiver goes to Wilf Rigter.
 Here
we go ! This one in action kinda looks like the Tilden Shok-Bot in movement.
There's a rubber boot around the RED-LED on the circuit board. Just inside
of that Boot is white heat shrink tubing to size the LED up to fit that
boot.
Here
we go ! This one in action kinda looks like the Tilden Shok-Bot in movement.
There's a rubber boot around the RED-LED on the circuit board. Just inside
of that Boot is white heat shrink tubing to size the LED up to fit that
boot.
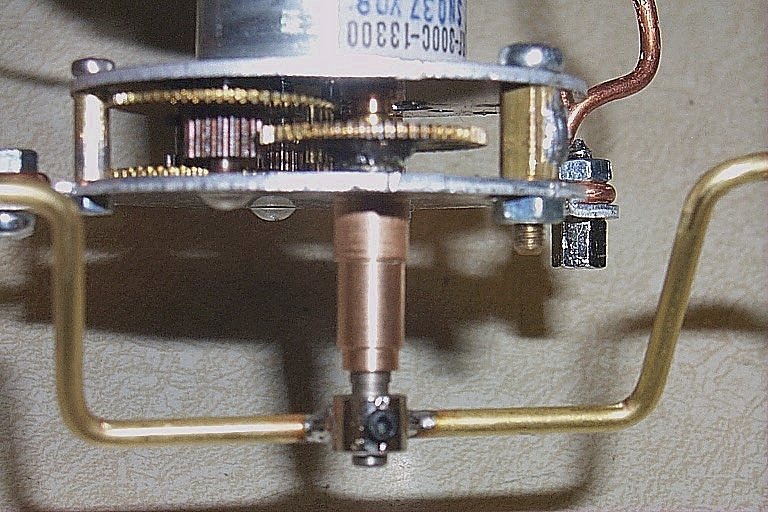
 Close
up of the front gearset. More details on the gears.html page (button above).
Close
up of the front gearset. More details on the gears.html page (button above).
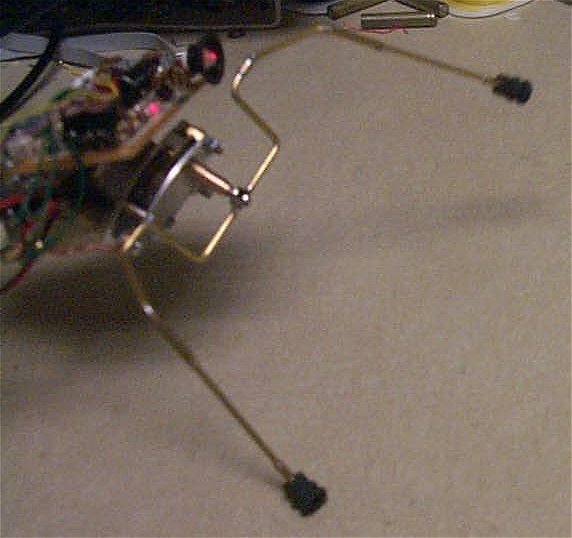
 This
was to be the second frame in a "movie" from a Kodak DC260 camera. It was
going to do 3fps and did two shots then quit, bummer. You can see the RED-LED
on and one of the four red-led's that show the microcore state. The picture
is fuzzy because the 'bug is on the move and the camera does drop picture
quality while it's trying to capture the stills.
This
was to be the second frame in a "movie" from a Kodak DC260 camera. It was
going to do 3fps and did two shots then quit, bummer. You can see the RED-LED
on and one of the four red-led's that show the microcore state. The picture
is fuzzy because the 'bug is on the move and the camera does drop picture
quality while it's trying to capture the stills.
Paul T. Barton

This page updated: February/27/2002
 Here
you see the front view, without the circuit board or batteries attached.
The rubber feet are for walking on carpet, works great! Normally my 'bots
can't walk on my carpet, this one does, but only with these 'boots' on.
Back feet just dig into the carpet nap and push ahead. Haven't tried the
backup circuit yet and may change how the back feet are shaped.
Here
you see the front view, without the circuit board or batteries attached.
The rubber feet are for walking on carpet, works great! Normally my 'bots
can't walk on my carpet, this one does, but only with these 'boots' on.
Back feet just dig into the carpet nap and push ahead. Haven't tried the
backup circuit yet and may change how the back feet are shaped.
 Left
side view, with all attached. Batteries are under the back gearset, held
in with a rubber band.
Left
side view, with all attached. Batteries are under the back gearset, held
in with a rubber band.
 Right
side view, with all unattached. Rubber feet are on the front legs. The
clear LED on the (left side in picture) circuit board is for future IR
object detection. It is a 6000mcd RED-LED, can't look into this one, it's
that bright. It shines a moving spot out in front from it's 8 degree light
cone. It pulses about 3Hz. Credit for LED driver
and receiver goes to Wilf Rigter.
Right
side view, with all unattached. Rubber feet are on the front legs. The
clear LED on the (left side in picture) circuit board is for future IR
object detection. It is a 6000mcd RED-LED, can't look into this one, it's
that bright. It shines a moving spot out in front from it's 8 degree light
cone. It pulses about 3Hz. Credit for LED driver
and receiver goes to Wilf Rigter.
 Here
we go ! This one in action kinda looks like the Tilden Shok-Bot in movement.
There's a rubber boot around the RED-LED on the circuit board. Just inside
of that Boot is white heat shrink tubing to size the LED up to fit that
boot.
Here
we go ! This one in action kinda looks like the Tilden Shok-Bot in movement.
There's a rubber boot around the RED-LED on the circuit board. Just inside
of that Boot is white heat shrink tubing to size the LED up to fit that
boot.
 Close
up of the front gearset. More details on the gears.html page (button above).
Close
up of the front gearset. More details on the gears.html page (button above).
 This
was to be the second frame in a "movie" from a Kodak DC260 camera. It was
going to do 3fps and did two shots then quit, bummer. You can see the RED-LED
on and one of the four red-led's that show the microcore state. The picture
is fuzzy because the 'bug is on the move and the camera does drop picture
quality while it's trying to capture the stills.
This
was to be the second frame in a "movie" from a Kodak DC260 camera. It was
going to do 3fps and did two shots then quit, bummer. You can see the RED-LED
on and one of the four red-led's that show the microcore state. The picture
is fuzzy because the 'bug is on the move and the camera does drop picture
quality while it's trying to capture the stills.