It has the following inputs:
1 Feeler. [JP3]
4 Gearmotor rotation limit switches.
CW and CCW for each motor. Closes to GND. [JP1 & JP2]
1 IR-Module sensor. (marked S28). [JP3]
It has the following outputs: [JP1 & JP2, in schematic]
4 motor driver signal outputs going to 74AC245 motor drivers.
4 LED's for state watching above 4 pins.
1 Pin & LED to the 74AC245 enable line, LED out = '245 off.
1 piezo element or cell phone ear speaker. [JP3]
1 Pin to a BS250 P-ch FET, in the RC clock circuit. 0 = fast, 1 = slow.
Slow = ~37KHz, Fast = ~61KHz, measured at OSC2/CLKOUT pin.
1 Pin - OSC2/CLKOUT, may later go to an IR-LED driver.
It has the following features:
PNC microcore, with pauses between steps.
Front feeler causes reversing, at a different gait.
Reversing:
Front only tips a little while rear moves a lot, for a pre-set # of cycles.
Goes, lip lop lip lop . . . (the sound it makes when moving in reverse).
Short cycles the front motor while the rear motor runs full time.
Fast forward upon sensing any IR, for a pre-set # of cycles, just after a quad "chirp".
Occasional pause & flash lights mode. (hiccup 1)
Occasional longer pause between steps. (hiccup 2)
Piezo element for chirps.
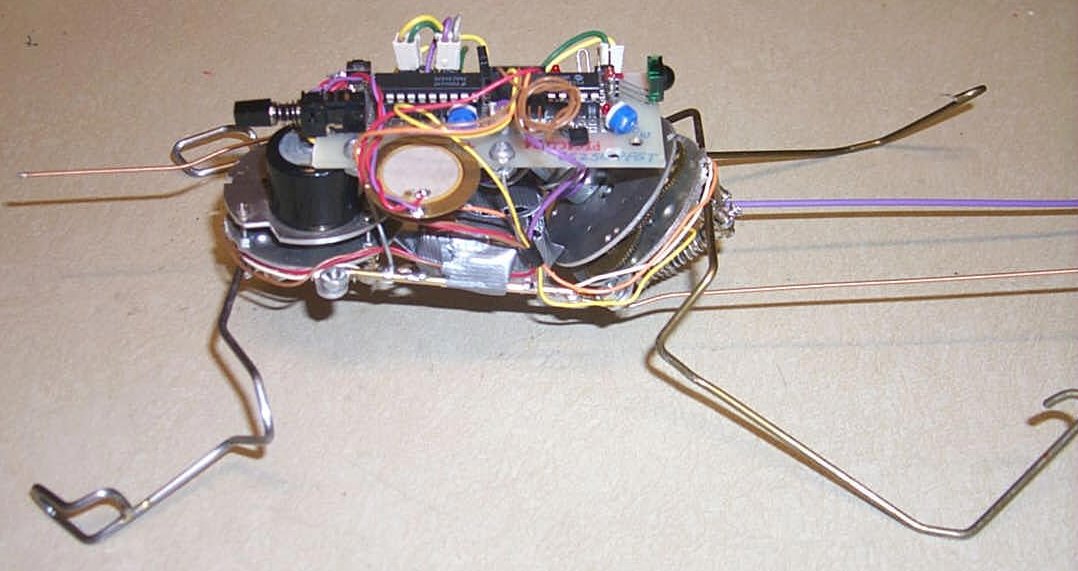
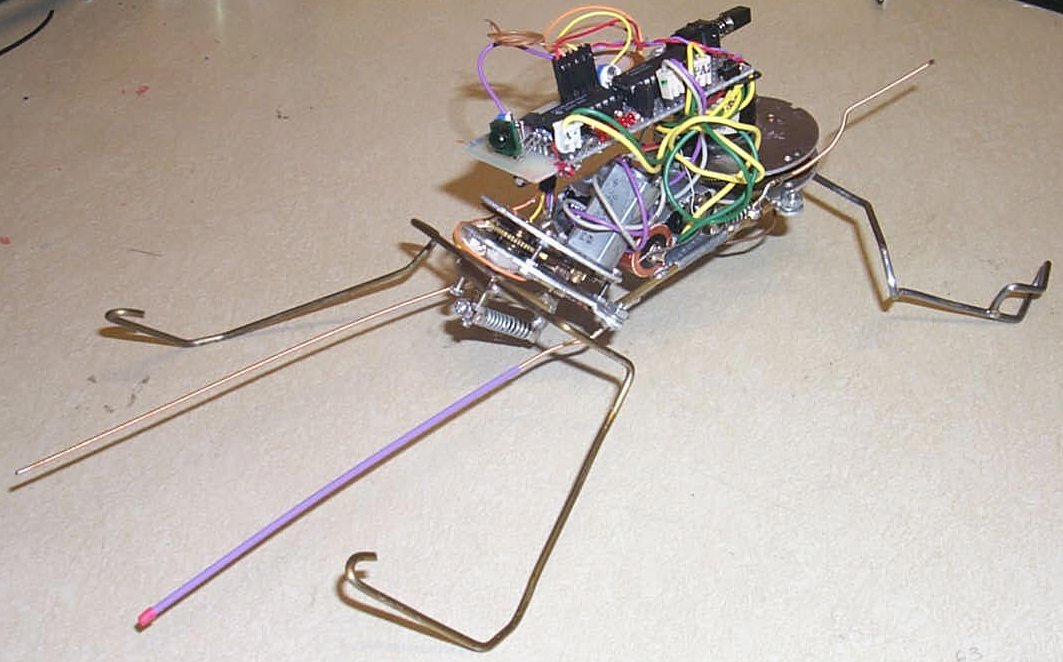
Here is a front angled view. Shows how steep the front motor
is angled back. Steps kinda high.
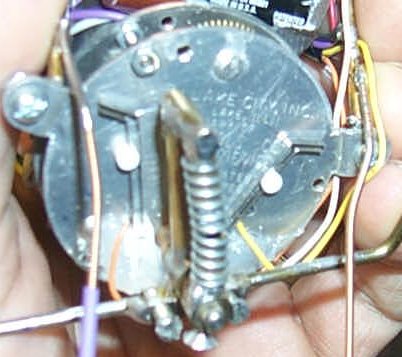
This shows the limit switches on the bottom of each gearmotor.
Some hot melt glue holds them in place. There's a small pin extending
down from the spring assembly to just above the motor plate (see arc scratches
in plate) that activates the switches.