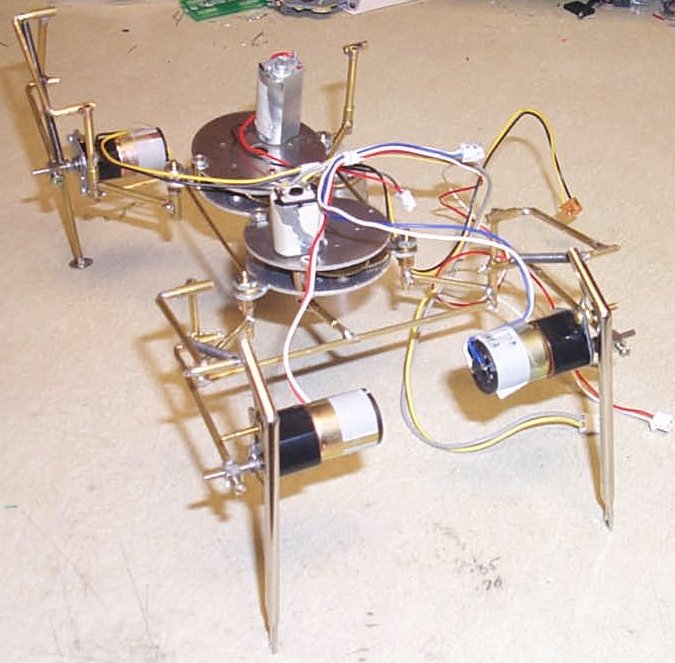
On 3/21/2001 it walked!
Kinda slow, but could be sped up with system tweeks.
I doubled the springs to the
front knees as they were much softer and smoother in action.
The circuit boards and batteries
need to be mounted in some kind of final positions.
The small brass rods that connect
the two center motors together need to be stiffened
as it flexes too much.
Here is a new style of leg assembly (maybe)? It only
has three legs for now, since I ran out of brass tubing. (I need a tire
jack ! haha). This "crawly" is spring loaded to maintain clearance underneath.

Side view. Shows only three legs, of course. The leg on the left, the
one by itself, has been shortened. That's a brass thumbtack on the leg
bottom for a "foot". You can see another DC motor in the back, used for
a "tire jack", holding up that space where the last leg goes. The front
pair of legs was constructed first, then the back set, the unfinished one.
Partial front view, everything "centered".
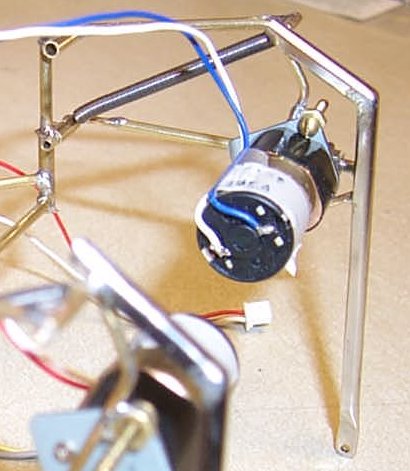
Here is a shot of the inside of one leg (left front). Those legs are
umbrella ribs.

Shows the center motor to one side (legs moved to your left).
This shows the center to the other side (legs moved to your right).
It is mostly constructed with hobby brass tubing except
the silver legs are unbrella ribs.
The springs came from an Ace Hardware $3.99 spring
assortment blister pack.
Center gear-motor moves the
whole leg assembly back and forth.
Each knee motor moves its' own leg up and down.
While building it, I realized that the knee motors
don't need to be at the "knee" but could be at the "hip" instead. So that's
where I put the "back-leg" motors.
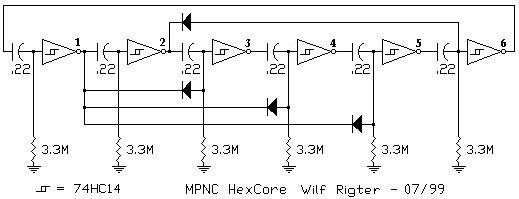
The hexcore is a 74HC14.
Resistors are 1M with a 1M POT for speed control,
caps are 0.22uF. The pot is set to about 400K.
74AC245 driver for all motors, no reversing for the
current build.
Incluced are LED's to see the motor cycles running
and to verify that it has only one cycle circulating.
The hexcore is wired as per Wilf Rigter's PNC version,
with the exceptions of the resistor values.
Note: it takes 5 cycles of pulses to clear it, with
each power-up. On the sixth cycle it is running at cycle #1.
So it does a little "dance" while getting ready to
walk.
Motors are numbered starting at the left front, #1.
| 1 | 2 | 3 | |
| 1 | D | ||
| 2 | U | ||
| 3 | CCW | ||
| 4 | D | ||
| 5 | U | ||
| 6 | CW |
| 4 | 5 | 6 | |
| 1 | CCW | ||
| 2 | D | ||
| 3 | U | ||
| 4 | CW | ||
| 5 | D | ||
| 6 | U |
| Orange, Rows are HexCore states.
Blue, Columns are motors action. |